







- Zoom,
-
Partager cette page
Prix de thèse de la MSHS-T 2022 : les travaux de Kathleen Belhassein (CLLE) récompensés !
Publié le 22 novembre 2022 – Mis à jour le 1 décembre 2022
Sa mission : faire coopérer la psychologie et la robotique, sans bug !

Kathleen Belhassein est chercheuse postdoctorale en sciences cognitives, dorénavant rattachée au laboratoire Pprime du CNRS.
Avec une solide formation en psychologie, elle a mené une thèse à la frontière entre psychologie et robotique, co-dirigé par les laboratoires CLLE et LAAS, et rendue possible grâce au financement ANR du projet JointAction4HRI.
Le prix de thèse de la Maison des Sciences de l’Homme et de la Société de Toulouse de cette année vient récompenser les qualités intrinsèques de ce travail de recherche sur la coopération entre humain et robot, ainsi que son caractère hautement pluri et interdisciplinaire.
Une partie des recherches dans l’Interaction Humain-Robot consiste à s’inspirer des interactions humaines afin de concevoir des systèmes robotiques interagissant de manière naturelle avec un partenaire humain, comme en témoigne le développement des robots sociaux.
L’objectif de travaux menés par Kathleen est de s’appuyer sur la littérature pour proposer des stratégies de communication permettant à un agent humain et à un agent robotique de coopérer efficacement.
Une partie de ses travaux s’est d’abord intéressée à la littérature en psychologie et philosophie pour une meilleure compréhension de mécanismes communicatifs, facilitant ainsi la coordination, la prédiction et la motivation des deux partenaires d’interaction et donc leur coopération.
Si une approche isolée est nécessaire d’un point de vue technologique, pour être efficiente, elle doit être complémentée par une approche plus globale intégrant les différents paramètres de l’ensemble de l’action conjointe pendant les processus de conception et d’évaluation des systèmes robotiques (comme le contexte, les normes sociales, le profil de l’humain etc).
Réalisée en Finlande, une de ses études cherchait à comparer l’impact de différentes stratégies de communication d’un robot, déployé dans un centre commercial, avec une tâche de description de route pour les visiteurs. Elle a été rendue possible grâce à l’étroite collaboration des doctorants du laboratoire LAAS, chargés de construire et paramétrer le robot, et également des partenaires du projet européen H2020 MuMMER, notamment les membres du VTT Technical Research Centre de Finlande.
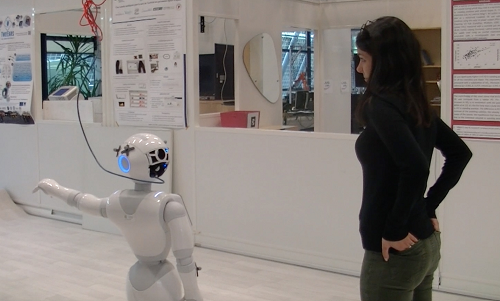 Les résultats montrent que le système robotique, lorsqu’il utilise des gestes de pointage simples vers le repère, en plus de son explication verbale, améliore l’évaluation de l’interaction par les participants et l’efficacité de la description de route. Plus l’on complexifie l’interaction en demandant au robot d’adopter un comportement calqué sur l’humain, plus les incompréhensions et les tensions se multiplient, interrompant ainsi la coopération.
Les résultats montrent que le système robotique, lorsqu’il utilise des gestes de pointage simples vers le repère, en plus de son explication verbale, améliore l’évaluation de l’interaction par les participants et l’efficacité de la description de route. Plus l’on complexifie l’interaction en demandant au robot d’adopter un comportement calqué sur l’humain, plus les incompréhensions et les tensions se multiplient, interrompant ainsi la coopération.
La dernière partie de la thèse s’est intéressée aux stratégies de récupération pouvant être mises en œuvre pour maintenir l’interaction et répondre à une défaillance imprévue lors de l’action jointe Humain-Robot. Au travers d’une étude exploratoire menée avec des enfants de 3 à 5 ans et d’une étude inspirée de la tâche du Directeur et adaptée à l’usage robotique, les stratégies et réactions communicatives adoptées face à différents types de défaillances ont été examinées. Les résultats évoquent notamment une différence de réactions en fonction de la nature du partenaire humain ou robotique. Les participants peuvent, par exemple, se montrer moins indulgents face à un robot défaillant.
Pour rendre plus efficaces les coopérations humain-robot, le travail de thèse réalisé par Kathleen Belhassein encourage à adopter de nouvelles stratégies communicatives propres à l’agent robotique, en prenant en compte ses capacités et ses possibilités de paramétrages. Il s’agit aussi d’étudier l’interaction en prenant bien en compte l’environnement global dans lequel elle est réalisée. Enfin, l’imaginaire lié aux robots est riche et les idées reçues nombreuses, bien souvent les attentes dépassent largement les capacités mêmes du robot, un temps introductif dédié à la présentation des caractéristiques du robot permettrait de redéfinir les possibles, gage d’une coopération plus efficace.
Le travail mené par Kathleen est en tout point un travail de collaboration. S’il se centre sur celles entre homme et machine, cela a aussi été une riche expérience d’associations entre les différents robots et logiciels utilisés et surtout les multiples domaines de recherche concernés : la psychologie, la robotique mais également la philosophie. L’enjeu principal a été de trouver un langage commun pour communiquer et se comprendre, pour que les disciplines s’enrichissent les unes des autres, tout au long du processus. Une méthodologie conjointe a été nécessaire, servant de socle à cette recherche dans un domaine en constante évolution.
Convaincue de l’importance de l’interdisciplinarité, Kathleen Belhassein est très heureuse de recevoir le prix de thèse de la MSHS-T, qui défend cette même valeur. Sa thèse, très formatrice, l’a amené à jouer avec les limites de chaque discipline et oriente maintenant la suite de sa carrière académique, en étant à la fois une reconnaissance de la qualité de ses travaux et un atout dans la recherche de financement et pour les concours.
Tournée maintenant vers la robotique industrielle, elle défend toujours la place des SHS et l’utilité de l’expertise psychologique dans ces sciences.
Avec une solide formation en psychologie, elle a mené une thèse à la frontière entre psychologie et robotique, co-dirigé par les laboratoires CLLE et LAAS, et rendue possible grâce au financement ANR du projet JointAction4HRI.
Le prix de thèse de la Maison des Sciences de l’Homme et de la Société de Toulouse de cette année vient récompenser les qualités intrinsèques de ce travail de recherche sur la coopération entre humain et robot, ainsi que son caractère hautement pluri et interdisciplinaire.
Humain – robot : vers une coopération efficace à livre ouvert
Une partie des recherches dans l’Interaction Humain-Robot consiste à s’inspirer des interactions humaines afin de concevoir des systèmes robotiques interagissant de manière naturelle avec un partenaire humain, comme en témoigne le développement des robots sociaux.L’objectif de travaux menés par Kathleen est de s’appuyer sur la littérature pour proposer des stratégies de communication permettant à un agent humain et à un agent robotique de coopérer efficacement.
Une partie de ses travaux s’est d’abord intéressée à la littérature en psychologie et philosophie pour une meilleure compréhension de mécanismes communicatifs, facilitant ainsi la coordination, la prédiction et la motivation des deux partenaires d’interaction et donc leur coopération.
Si une approche isolée est nécessaire d’un point de vue technologique, pour être efficiente, elle doit être complémentée par une approche plus globale intégrant les différents paramètres de l’ensemble de l’action conjointe pendant les processus de conception et d’évaluation des systèmes robotiques (comme le contexte, les normes sociales, le profil de l’humain etc).
Sur le terrain de l’action jointe
La thèse de Kathleen a aussi été enrichie d’un important travail empirique.Réalisée en Finlande, une de ses études cherchait à comparer l’impact de différentes stratégies de communication d’un robot, déployé dans un centre commercial, avec une tâche de description de route pour les visiteurs. Elle a été rendue possible grâce à l’étroite collaboration des doctorants du laboratoire LAAS, chargés de construire et paramétrer le robot, et également des partenaires du projet européen H2020 MuMMER, notamment les membres du VTT Technical Research Centre de Finlande.
Les résultats montrent que le système robotique, lorsqu’il utilise des gestes de pointage simples vers le repère, en plus de son explication verbale, améliore l’évaluation de l’interaction par les participants et l’efficacité de la description de route. Plus l’on complexifie l’interaction en demandant au robot d’adopter un comportement calqué sur l’humain, plus les incompréhensions et les tensions se multiplient, interrompant ainsi la coopération.La dernière partie de la thèse s’est intéressée aux stratégies de récupération pouvant être mises en œuvre pour maintenir l’interaction et répondre à une défaillance imprévue lors de l’action jointe Humain-Robot. Au travers d’une étude exploratoire menée avec des enfants de 3 à 5 ans et d’une étude inspirée de la tâche du Directeur et adaptée à l’usage robotique, les stratégies et réactions communicatives adoptées face à différents types de défaillances ont été examinées. Les résultats évoquent notamment une différence de réactions en fonction de la nature du partenaire humain ou robotique. Les participants peuvent, par exemple, se montrer moins indulgents face à un robot défaillant.
Pour rendre plus efficaces les coopérations humain-robot, le travail de thèse réalisé par Kathleen Belhassein encourage à adopter de nouvelles stratégies communicatives propres à l’agent robotique, en prenant en compte ses capacités et ses possibilités de paramétrages. Il s’agit aussi d’étudier l’interaction en prenant bien en compte l’environnement global dans lequel elle est réalisée. Enfin, l’imaginaire lié aux robots est riche et les idées reçues nombreuses, bien souvent les attentes dépassent largement les capacités mêmes du robot, un temps introductif dédié à la présentation des caractéristiques du robot permettrait de redéfinir les possibles, gage d’une coopération plus efficace.
 Un prix, des collaborations
Un prix, des collaborations
Le travail mené par Kathleen est en tout point un travail de collaboration. S’il se centre sur celles entre homme et machine, cela a aussi été une riche expérience d’associations entre les différents robots et logiciels utilisés et surtout les multiples domaines de recherche concernés : la psychologie, la robotique mais également la philosophie. L’enjeu principal a été de trouver un langage commun pour communiquer et se comprendre, pour que les disciplines s’enrichissent les unes des autres, tout au long du processus. Une méthodologie conjointe a été nécessaire, servant de socle à cette recherche dans un domaine en constante évolution.Convaincue de l’importance de l’interdisciplinarité, Kathleen Belhassein est très heureuse de recevoir le prix de thèse de la MSHS-T, qui défend cette même valeur. Sa thèse, très formatrice, l’a amené à jouer avec les limites de chaque discipline et oriente maintenant la suite de sa carrière académique, en étant à la fois une reconnaissance de la qualité de ses travaux et un atout dans la recherche de financement et pour les concours.
Tournée maintenant vers la robotique industrielle, elle défend toujours la place des SHS et l’utilité de l’expertise psychologique dans ces sciences.